В физике степени свободы (DOF) механической системы — это количество независимых параметров, определяющих ее конфигурацию или состояние. Это важно при анализе систем тел в машиностроении, строительной технике, аэрокосмической технике, робототехнике и других областях.
Положение одного вагона (локомотива), движущегося по рельсам, имеет одну степень свободы, поскольку положение вагона определяется расстоянием вдоль рельсов. Поезд из жестких вагонов, соединенных шарнирами с локомотивом, по-прежнему имеет только одну степень свободы, поскольку положения вагонов за локомотивом ограничены формой рельсов.
Автомобиль с очень жесткой подвеской можно рассматривать как твердое тело, движущееся по плоскости (плоскому двумерному пространству). Это тело имеет три независимые степени свободы, состоящие из двух составляющих поступательного движения и одного угла поворота. Занос или занос — хороший пример трех независимых степеней свободы автомобиля.
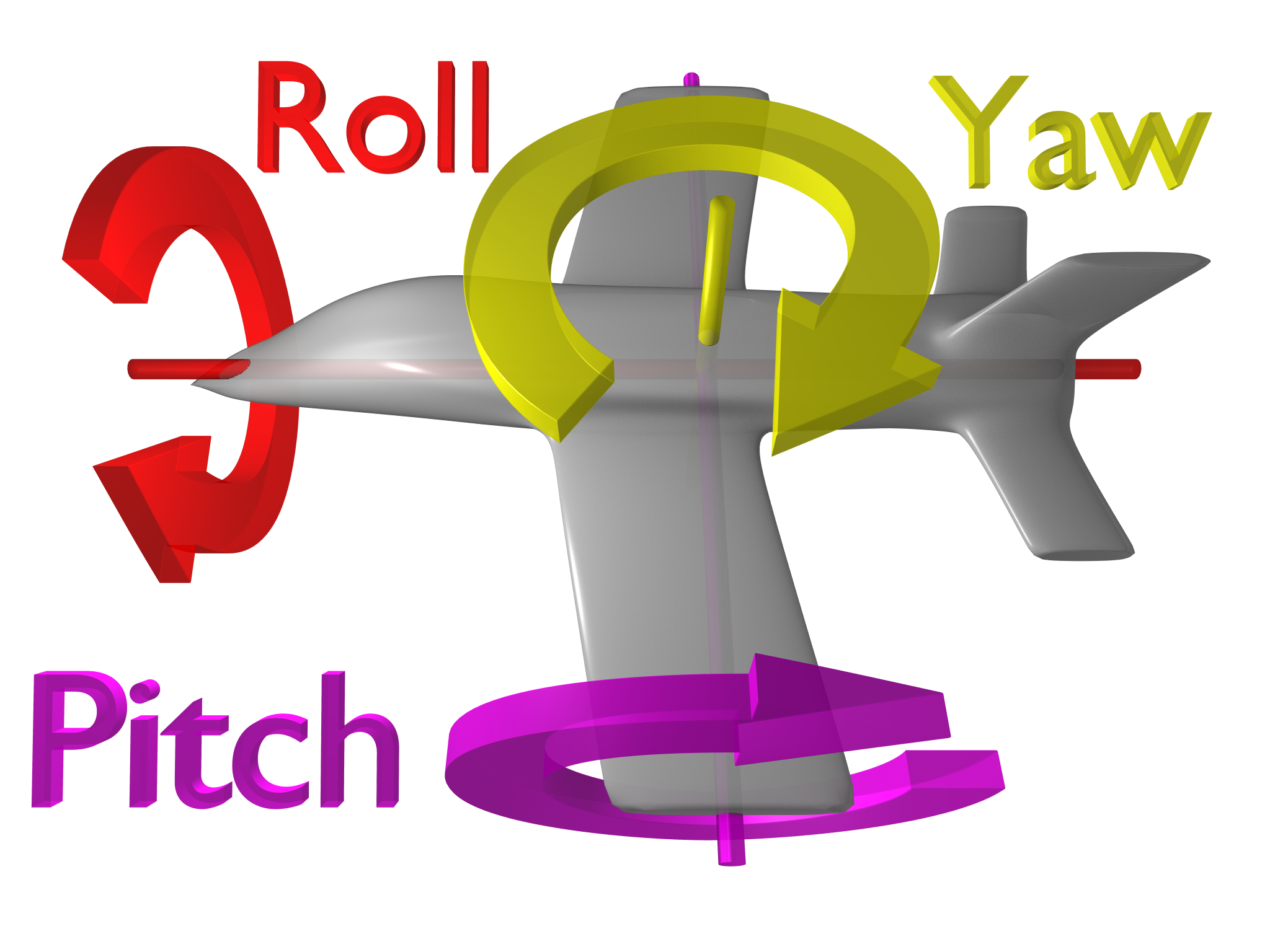
Положение и ориентация твердого тела в пространстве определяются тремя компонентами перемещения и тремя компонентами вращения, что означает, что оно имеет шесть степеней свободы.
Метод механического проектирования с точными ограничениями управляет степенями свободы, чтобы не ограничивать и не перегружать устройство.
Положение n-мерного твердого тела определяется жестким преобразованием, [T] = [A, d], где d — это n-мерный перевод, а A — это n × n матрица вращения, которая имеет n поступательных степеней свободы и n(n − 1)/2 вращательных степеней свободы. Число вращательных степеней свободы зависит от размерности группы вращения SO(n).
Нежесткое или деформируемое тело можно рассматривать как совокупность множества мельчайших частиц (бесконечное число степеней свободы), это часто аппроксимируется системой с конечной степенями свободы. Когда основной целью исследования является движение, связанное с большими перемещениями (например, для анализа движения спутников), деформируемое тело можно аппроксимировать как твердое тело (или даже частицу), чтобы упростить анализ.
")
Степень свободы системы можно рассматривать как минимальное количество координат, необходимое для задания конфигурации. Применяя это определение, мы имеем:
Отдельное твердое тело имеет не более шести степеней свободы (6 степеней свободы) 3T3R, состоящих из трех перемещений 3T и трех вращений 3R.
См. также углы Эйлера.
Например, движение корабля в море имеет шесть степеней свободы твердого тела и описывается как:
Например, траектория полета самолета имеет три степени свободы, а его положение на траектории имеет три степени свободы, всего шесть степеней свободы.
Физические ограничения могут ограничивать количество степеней свободы одного твердого тела. Например, блок, скользящий по плоскому столу, имеет 3 степени свободы 2T1R, состоящие из двух перемещений 2T и 1 вращения 1R. Робот для позиционирования XYZ, такой как SCARA, имеет мобильность на 3 степени свободы 3T ниже.
Формула подвижности подсчитывает количество параметров, определяющих конфигурацию набора твердых тел, которые ограничены шарнирами, соединяющими эти тела.
Предположим, что система из n твердых тел, движущихся в пространстве, имеет 6n степеней свободы, измеренных относительно неподвижной системы отсчета. Чтобы посчитать степени свободы этой системы, включите в число тел неподвижное тело так, чтобы подвижность не зависела от выбора тела, образующего неподвижный каркас. Тогда степень свободы неограниченной системы N = n + 1 равна
потому что неподвижное тело имеет нулевую степень свободы относительно самого себя.
Суставы, соединяющие тела в этой системе, лишают степеней свободы и уменьшают подвижность. В частности, петли и ползунки налагают по пять ограничений и, следовательно, удаляют пять степеней свободы. Удобно определить количество ограничений c, которые накладывает сустав, с точки зрения свободы сустава f, где c = 6 − е. В случае шарнира или ползунка, которые представляют собой соединения с одной степенью свободы, f = 1 и, следовательно, c = 6 − 1 = 5.
В результате подвижность системы формируется из n движущихся звеньев и j соединений, каждое из которых имеет свободу fi< /i>, i = 1, …, j, определяется выражением
Напомним, что N включает фиксированную ссылку.
Есть два важных особых случая: (i) простая открытая цепь и (ii) простая закрытая цепь.
Отдельная открытая цепь состоит из n подвижных звеньев, соединенных встык с помощью n соединений, причем один конец соединен с заземляющим звеном. Таким образом, в данном случае N = j + 1 и подвижность цепи равна
В простой замкнутой цепи n подвижных звеньев соединены встык с помощью n +1 суставов, так что два конца соединены с заземляющим звеном, образуя петлю. В этом случае N = j и подвижность цепи равна
Примером простой открытой цепи является серийный робот-манипулятор. Эти роботизированные системы состоят из ряда звеньев, соединенных шестью вращающимися или призматическими шарнирами с одной степенью свободы, поэтому система имеет шесть степеней свободы.
Примером простой замкнутой цепи является пространственная четырехзвенная связь РССР. Сумма свобод этих шарниров равна восьми, поэтому подвижность звена равна двум, где одна из степеней свободы представляет собой поворот муфты вокруг линии, соединяющей два S-образных шарнира.
Обычной практикой является проектирование системы рычагов таким образом, чтобы движение всех тел лежало в параллельных плоскостях, образуя так называемое плоское соединение. Также возможно построить систему связей так, чтобы все тела двигались по концентрическим сферам, образуя сферическую связь. В обоих случаях степени свободы связей в каждой системе теперь равны трем, а не шести, а ограничения, налагаемые соединениями, теперь составляют c = 3 − f.
В этом случае формула мобильности имеет вид
и особые случаи становятся
Примером плоской простой замкнутой цепи является плоская четырехзвенная связь, которая представляет собой четырехзвенную петлю с четырьмя шарнирами с одной степенью свободы и, следовательно, имеет подвижность M = 1.
Система с несколькими телами будет иметь объединенную степень свободы, которая представляет собой сумму степеней свободы тел за вычетом внутренних ограничений, которые они могут иметь на относительное движение. Механизм или связь, содержащая несколько соединенных твердых тел, может иметь больше степеней свободы, чем одно твердое тело. Здесь термин степени свободы используется для описания количества параметров, необходимых для определения пространственного положения связи. Оно также определяется в контексте пространства конфигурации, пространства задач и рабочего пространства робота.
Особым типом связи является открытая кинематическая цепь, в которой набор жестких звеньев соединены в шарнирах; соединение может иметь одну степень свободы (шарнирное/скользящее) или две (цилиндрическое). Такие цепочки обычно встречаются в робототехнике, биомеханике, а также на спутниках и других космических объектах. Считается, что человеческая рука имеет семь степеней свободы. Плечо обеспечивает подачу, рысканье и крен, локоть обеспечивает подачу, а запястье позволяет выполнять подачу, рыскание и крен. Для перемещения руки в любую точку пространства потребуется всего три таких движения, но у людей не будет возможности захватывать предметы под разными углами и направлениями. Робот (или объект), имеющий механизмы управления всеми шестью физическими степенями свободы, называется голономным. Объект с меньшим количеством контролируемых степеней свободы, чем общее количество степеней свободы, называется неголономным, а объект с более управляемыми степенями свободы, чем общее количество степеней свободы (например, человеческая рука), называется избыточным. Хотя имейте в виду, что для человеческой руки это не является лишним, поскольку две степени свободы; запястье и плечо, представляющие одно и то же движение; перекатывайтесь, снабжайте друг друга, так как они не могут сделать полный поворот на 360 градусов.
Степень свободы подобна различным движениям, которые можно совершать.
В мобильной робототехнике робот, похожий на автомобиль, может достигать любого положения и ориентации в двумерном пространстве, поэтому для описания его позы требуется 3 степени свободы, но в любой момент вы можете переместить его только движением вперед и углом поворота рулевого колеса. Таким образом, у него есть две контрольные степени свободы и три репрезентативные степени свободы; т. е. он неголономен. Самолет с 3–4 степенями свободы управления (движение вперед, крен, тангаж и, в ограниченной степени, рыскание) в трехмерном пространстве также неголономен, поскольку он не может двигаться непосредственно вверх/вниз или лево право.
Краткое изложение формул и методов вычисления степеней свободы в механических системах было дано Пеннестри, Кавачече и Вита.
В электротехнике степени свободы часто используются для описания количества направлений, в которых фазированная антенная решетка может формировать либо лучи, либо нули. Оно на единицу меньше числа элементов, содержащихся в решетке, поскольку один элемент используется в качестве эталона, к которому могут быть применены либо конструктивные, либо деструктивные помехи с использованием каждого из остальных элементов антенны. Практика использования радиолокаторов и линий связи, при этом управление лучом более распространено для радиолокационных приложений, а нулевое управление более распространено для подавления помех в линиях связи.